Strela
Вы хотите построить робота, но не знаете какая электроника вам понадобится? Платформа Strela идеально подходит для создания лёгкого мобильного робота и содержит в себе всё необходимое для этого.
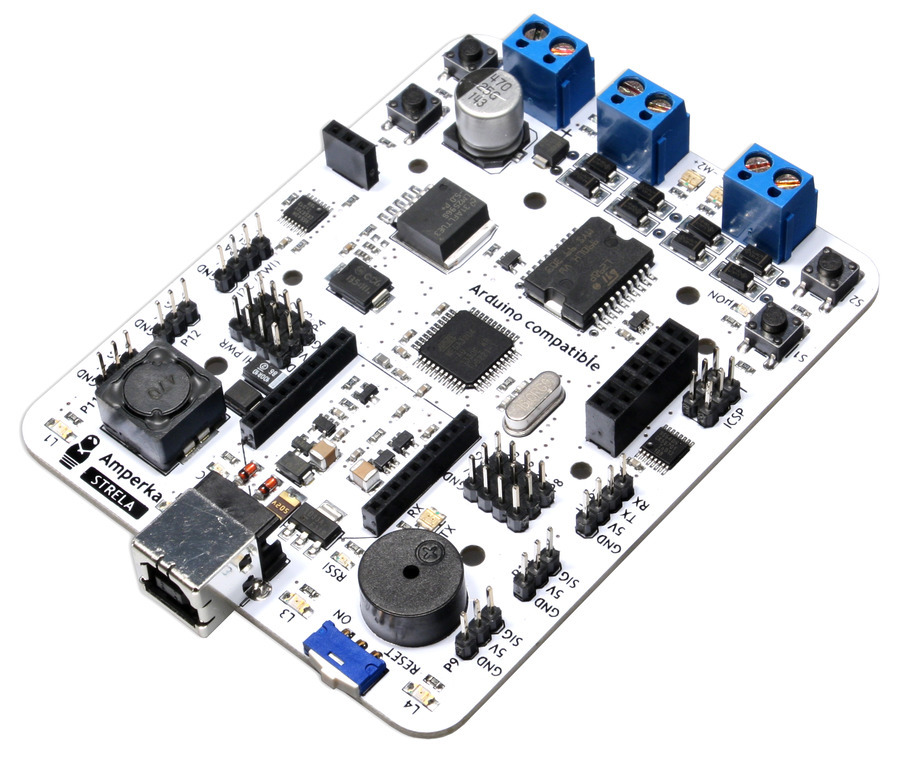
Arduino-совместимая платформа Strela разработана и выпускается Амперкой как материнская плата для постройки роботов. Одна эта плата призвана заменить собой Arduino с несколькими шилдами, которые обычно применяются в роботах. А благодаря библиотеке Strela, работа с платой не вызовет затруднений даже у начинающих роботостроителей.
«Стрела» отлично подходит для соревнований. Вы можете сделать на её основе колёсного робота, который отлично себя покажет при езде по линии, в сумо, в лабиринте и во многих других категориях. А благодаря наличию на плате разъёма для подключения беспроводных модулей связи формата XBee не составит труда сделать робота с беспроводным управлением. Эта плата пригодится не только для строительства роботов. Ничего не мешает использовать её там, где необходимо управление двигателями или сервоприводами. Например, она может управлять шторами на окнах, в зависимости от освещённости на улице, или управлять мотор-колесом на электросамокате.
Микроконтроллер
«Мозг» платы — микроконтроллер ATmega32u4. Это тот же самый микроконтроллер, что установлен в Arduino Leonardo. Этот контроллер используется и в качестве USB-UART преобразователя для прошивки.
Смело выбирайте модель Leonardo при работе с платой через Arduino IDE или визуальную среду XOD IDE.
Входы/выходы ATmega32u4
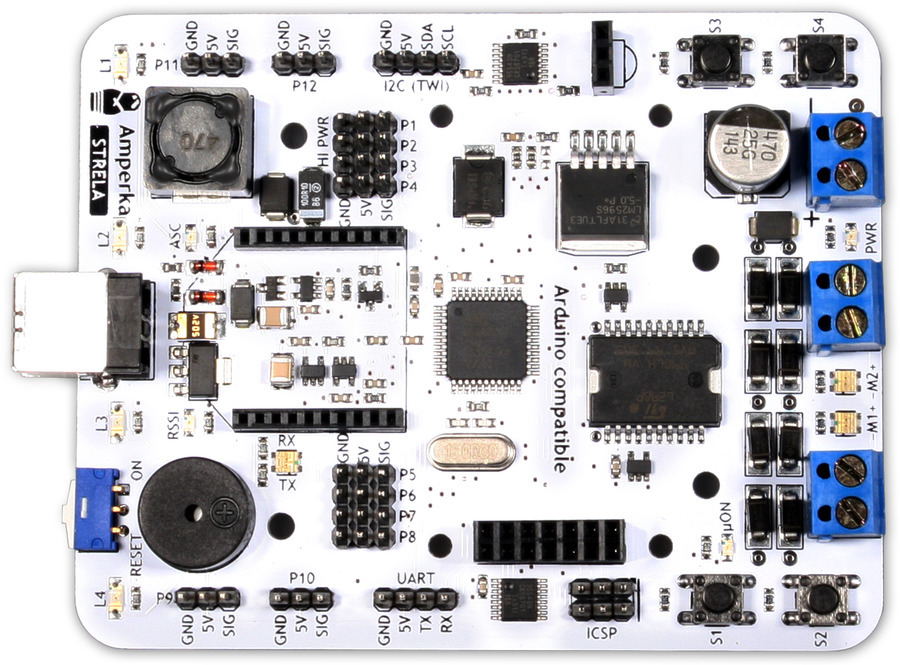
Одиннадцать входов/выходов микроконтроллера ATmega32u4 выведены на специальные тройки контактов «питание–земля–сигнал», где питание соединено с контактом 5V, земля — с GND, а сигнал с соответствующим цифровым или аналоговым контактом. Такое расположение входов/выходов позволит подключить к платформе большое количество периферии вроде сенсоров через стандартные 3-проводные шлейфы. Это позволяет не прибегать к пайке, и к отдельно стоящему breadboard’у.
Контакты питания пинов P1–P4 соединены широкими контактными дорожками с DC–DC преобразователем. Это позволяет подключать к этим контактам достаточно мощную нагрузку, например сервоприводы.
- Контакты P4–P9, P11, P12 подключены к АЦП, а следовательно могут быть использованы как аналоговые входы.
- Широтно-имульсная модуляция (ШИМ/PWM) доступна на контактах P1–P4.
- Контакт P12 может быть использован для подключения ИК-приёмника, такого как TSOP22.
Входы/выходы I²C-расширителей портов
На платформе Strela имеются 2 расширителя цифровых входов/выходов PCA9554. Один из них имеет адрес I²C-адрес 0x20, используется для управления встроенными светодиодами и кнопками. Второй имеет I²C-адрес 0x21 для управления LCD-экраном MT-08S2A-2FLA (в комплект не входит) и контактом P10. При отсутствии экрана вы можете использовать эти контакты для управления вашими устройствами.
Оборудование доступное для управления по I2C:
- 4× Кнопка
- 4× Светодиод
- LCD-экран MT-08S2A-2FLA
- Пин P10
Связь
Платформа Strela поддерживает несколько различных протоколов связи:
- USB используется для прошивки робота, и как виртуальный последовательный порт для связи с компьютером.
- SPI. Контакты SPI выведены на стандартный блок контактов ICSP. Три контакта шины SPI могут быть использованы в качестве цифровых входов/выходов микроконтроллера.
- UART. Контакты UART выведены на четырёхштырьковый разъём (RX, TX, 5V, GND). Контакты RX и TX используются и для коммуникации с беспроводными модулями связи формата XBee, а так же могут быть использованы в качестве цифровых входов/выходов микроконтроллера.
- TWI/I²C используется для связи с установленными на плате расширителями портов ввода/вывода, которые имеют адрес 0x20 и 0x21. Контакты TWI/I²C выведены на четырёхштырьковый разъём (SCL, SDA, 5V, GND), к ним могут быть подключены другие TWI/I²C-устройства. Что бы не мешать работе расширителям портов ввода/вывода, I²C-устройства должны иметь отличный от них адрес.
- XBee. На плате находится разъём для подключения беспроводных модулей связи формата XBee. Установив соответствующий модуль связи, вы сможете общаться с платформой через XBee или Bluetooth.
- ИК. На плате расположено гнездо для подключения ИК-приёмника, такого как TSOP22. Поэтому можно управлять роботом с обычного пульта управления от бытовой техники. Например, с такого пульта можно дать старт роботу во время соревнований.
Силовая часть
Выводы микроконтроллера являются слаботочными, поэтому ток мотора, при подключении его напрямую, выведет их из строя. Эту проблему решает так называемый H-мост. Он позволяет управлять скоростью и направлением вращения мотора с помощью логических сигналов микроконтроллера. Для управления двигателями робота на плате предусмотрен H-мост L298P. Именно эта микросхема отвечает за управление моторами в Motor Shield. Плата имеет 2 независимых канала. Используя их, можно подключить на выбор:
- Пару DC-моторов
- Один двухфазный шаговый мотор.
- Один DC-мотор с током до 4 А, если объединить каналы
На плате расположены светодиоды-индикаторы, показывающие направление и скорость по каждому из каналов.
Выходы под каждый из двигателей выполнены в виде клеммника с винтом, поэтому пайка не требуется.
При разгоне и торможении двигатели сами индуцируют кратковременный обратный ток большой величины, который может выжечь контакты микроконтроллера. Поэтому на платформе Strela установлены возвратные диоды, которые это предотвращают.
Питание
Новички при постройке робота часто сталкиваются с проблемой перезагрузки управляющего контроллера при броске нагрузки на двигателях. Обычно эту проблему решают с помощью раздельного питания двигателей и микроконтроллера, или при помощи DC–DC преобразователя. Платформа Strela уже содержит встроенный в плату DC–DC преобразователь LM2596-5.0. Это означает, что вам понадобится всего один источник питания для робота. DC–DC преобразователь на выходе точно выдерживает напряжение 5 В, необходимые для питания микроконтроллера. Поэтому ваш робот не будет перезагружаться в неподходящий момент при резком увеличении оборотов двигателей.
Плата может быть запитана от источника постоянного тока с напряжением 7–24 В. Она может получать питание и от USB, это удобно во время отладки и программирования робота. При этом силовая часть будет получать очень низкое напряжение, и двигатели могут не крутиться.
Reset
На плате присутствует переключатель, который бывает полезен при отладке или при подготовке к старту на соревнованиях. В положении «RESET» контакт Reset микроконтроллера замыкается на землю. В таком положении на микроконтроллер подано напряжение, но он не работает, поэтому робот никуда не убежит при отладке у компьютера. Чтобы запустить микроконтроллер необходимо перевести рычажок в положение «ON».
Пьезодинамик
На плате установлен пьезодинамик, который может пропищать победную мелодию на финише или оповестит о срабатывании датчика. Для работы с ним в Arduino IDE можно использовать встроенную функцию tone или богатую возможностями библиотеку Tone.
Характеристики
| Микроконтроллер | ATmega32u4 |
| Рабочее напряжение | 5 В |
| Максимальный ток через контакт входа/выхода | 40 мА |
| Количество цифровых входов/выходов, выведенных на штырьковые контакты | 11 |
| ... из них могут использоваться как аналоговые входы | 8 |
| Количество каналов PWM | 4 |
| Выведенные интерфейсы | UART, SPI, I2C |
| Объём Flash-памяти | 32 кБ |
| Объём SRAM-памяти | 2,5 кБ |
| Объём внутренней EEPROM-памяти | 1 кБ |
| Тактовая частота | 16 МГц |
| Загрузчик | Arduino Leonardo |
| I²C-расширитель портов | 2× PCA9554 |
| Количество цифровых входов/выходов | 16 |
| ... из них выведены на штырьковые контакты | 1 |
| ... используется для управления встроенными светодиодами | 4 |
| ... используется для считывания положения встроенных кнопок | 4 |
| ... используется для управления экраном MT-08S2A-2YLG | 7 |
| Питание | |
| DC–DC преобразователь | LM2596-5.0 |
| Выходное напряжение | 5 В |
| Максимальное входное напряжение | 24 В |
| Максимальный ток нагрузки | 3 А |
| Силовая часть | |
| H–мост | L298P |
| Количество каналов управления | 2 |
| Максимальный ток нагрузки на канал | 2 А |
| Размеры | 105×79×14 мм |
Ресурсы
Видеообзор платформы:

Наверняка понадобятся
-

Знакосинтезирующий ЖК-индикатор МЭЛТ с 2 строками по 8 символов
890 ₽ -

Модуль Bluetooth второго поколения с возможностью работы в режимах Master/Slave и питанием от 3,3—5 В
1 240 ₽ -
Детали для крепления плат Arduino Uno, Iskra Neo и совместимых с ними
440 ₽ -

Конструктор для сборки двухколёсного робота из #структора с моторами и сервоприводом
5 990 ₽



