Драйвер двигателей 4tronix drive:bit


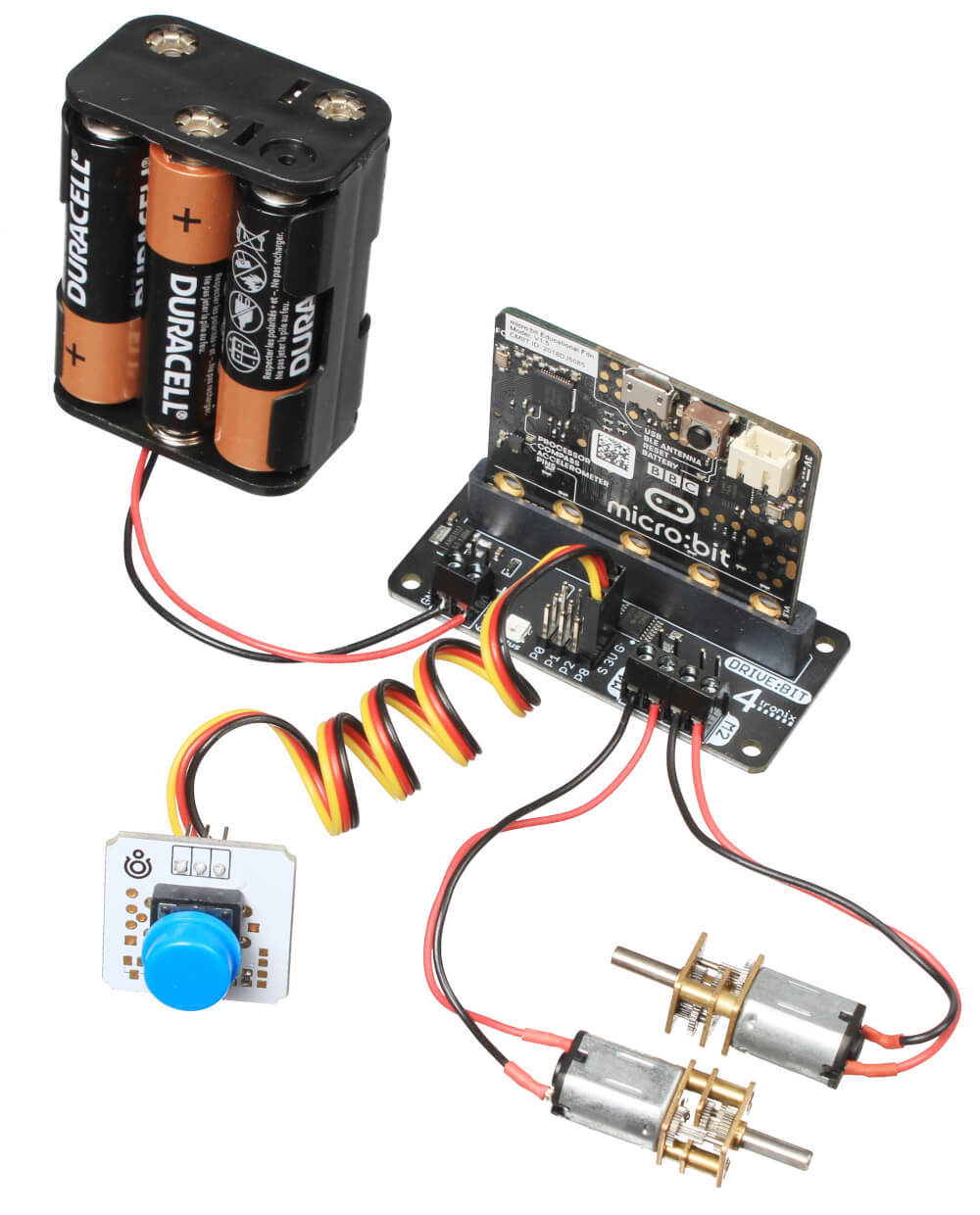
Подключите к управляющей плате micro:bit два мотора через драйвер drive:bit, и вы сможете превратить любую мелкую коробку в двухколёсного робота!
Модуль построен на драйвере DRV8833 и рассчитан на управление микромоторами с рабочим напряжением 5–9 В и подключение до 4 периферийных устройств. Это позволяет без особого труда собирать мобильных DIY-роботов на micro:bit и программировать их в графической среде MakeCode.
Особенности
- Драйвер двигателей с чипом DRV8833: 2 канала нагрузки до 1 А каждый.
- Наглядная индикация с адресным светодиодом WS2812.
- Поддержка 3,3-вольтовой периферии с подключением по трём проводам.
- Монтажные отверстия для надёжного крепления в корпусе.
- Подключение проводами без пайки и хлопот.
Подключение
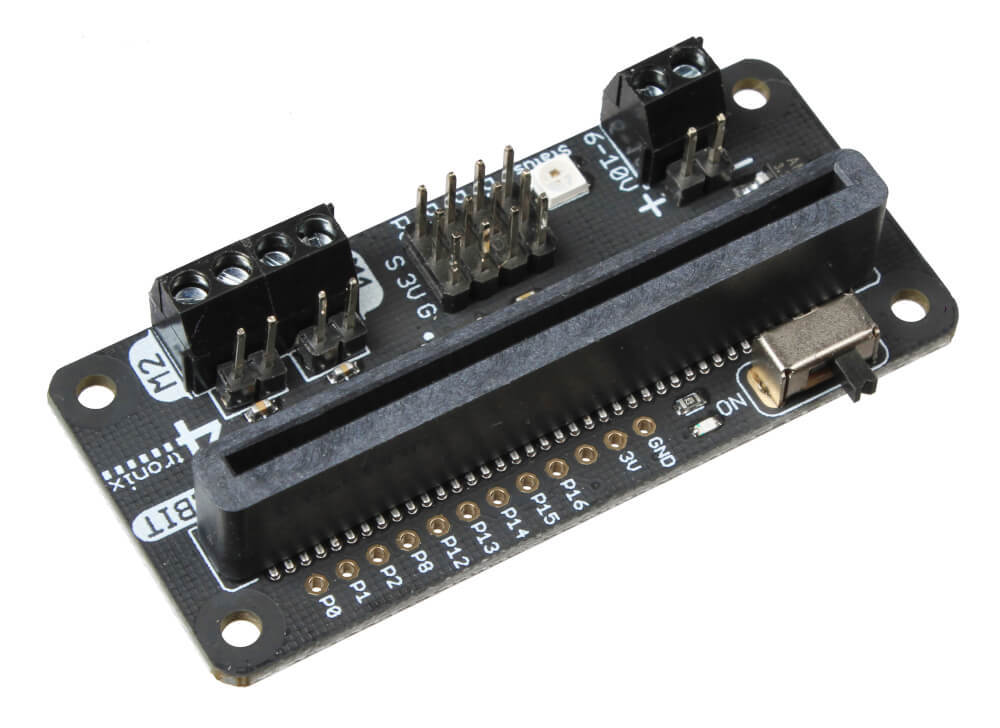
Драйвер drive:bit содержит гнездо для прямого подключения платы BBC micro:bit через краевой разъём.
Двигатели подключаются к винтовым клеммникам M1-M2 или через штыревые соединители «папа» рядом с ними.
На плате выведены контакты «Микробита» P0, P1, P2 и P8, к которым можно подключить дополнительные датчики или сервоприводы через трёхпроводной интерфейс:
- S — сигнал модуля.
- 3V — питание 3,3 В.
- G — общая земля.
Обратите внимание, что micro:bit поддерживает только периферию с логическим напряжением 3,3 В.
Программирование
Модуль drive:bit управляется в программной среде MakeCode с помощью визуальных блоков или текстового кода на JavaScript и MicroPython. Они позволяют не только контролировать вращение обоих двигателей, но и задавать программную поправку для движения по прямой без отклонений.
Питание
Драйвер питается через винтовой клеммник: сюда можно подключить батарейный отсек 3×2 AA или любой источник напряжения 6–10 В с током 2 А. Клеммник питания продублирован штыревыми соединителями «папа».
Модуль оборудован физическим выключателем, который обесточивает моторы и управляющую плату micro:bit.
Обратите внимание, что двигатели не заработают без подключения внешнего питания к drive:bit.
Возможные альтернативы
Существует аналогичная плата 4tronix servo:bit для управления сервоприводами, а для ленивых — готовые робо-шасси для «Микробита».
Комплектация
- 1× Плата-модуль
Характеристики
- Модель: 4tronix drive:bit
- Совместимость: микрокомпьютеры BBC micro:bit
- Разъём модуля: гнездо под краевой разъём micro:bit
- Индикация: RGB-светодиод WS2812
- Микросхема драйвера двигателей: DRV8833
- Количество подключаемых моторов: 2
- Напряжение питания: 6–10 В (с защитой от переполюсовки)
- Рабочее напряжение моторов: 5–9 В
- Ток нагрузки: до 1 А на канал
- Размеры: 65×30,5×12,8 мм
Наверняка понадобятся
-

Двухрядный держатель для шести «пальчиковых» батареек или аккумуляторов типа AA / LR6
180 ₽ -
Упаковка «пальчиковых» алкалиновых батареек типоразмера AA / LR6
340 ₽ -

Микромотор 5 В шириной 12 мм с редуктором 1:100 и D-образным шпинделем 3 мм
820 ₽ -

Микромотор 9 В шириной 12 мм с редуктором 1:100 и D-образным шпинделем 3 мм
-

Улучшенная плата-контроллер со светодиодным табло 5×5, зуммером, микрофоном и сенсорами для обучения программированию
4 990 ₽





Возможные альтернативы
-

Плата расширения micro:bit для управления 16 сервоприводами
2 940 ₽
