Мобильные роботы на базе Arduino

Книга учит начинающих конструкторов строить мобильных роботов на популярной платформе Arduino в форме практических проектов. Воспользуйтесь единой четырёхколесной базой, чтобы воспроизводить учебные проекты от простой машинки на радиоуправлении до интеллектуального говорящего робота.
Вы узнаете, как управлять моторами, собирать механику и соединять электронику, программировать основные функции и управлять роботом. Создаваемые роботы смогут обходить препятствия, выбираться из запутанных лабиринтов, искать кегли и определять их цвета, ориентироваться по электронному компасу, гироскопу и даже балансировать на двух колёсах.
Электронное приложение к книге содержит детали робота для печати на 3D-принтере, векторные рисунки для резки лазером, листинги, дополнительные библиотеки и программы.
Особенности второго издания
Обновлены все алгоритмы, добавлены проекты с гироскопом-акселерометром, говорящий робот, голосовое управление роботом, механическая «рука» и др.
Данные
- Автор: Михаил Момот
- Формат: 165×233 мм
- Кол-во страниц: 336
- Тип издания: мягкая обложка
- Печать: чёрно-белая
- Год выхода: 2021 (второе издание)
- Издательство: «БХВ-Петербург»
- ISBN: 978-5-9775-3861-9
Оглавление
Введение
Глава 1. Основные составные части робота
- Информационно-измерительная система
- Датчик касания
- Датчик температуры
- Датчик освещённости
- Датчик препятствия
- Ультразвуковой датчик расстояния
- Оптический рефлекторный датчик расстояния
- Детектор шума
- Энкодер
- Датчик движения
- Датчик газа
- Датчик влажности
- Видеокамера
- Система принятия решений
- Микроконтроллер
- Контроллер Arduino
- Система связи
- Инфракрасный приёмник
- Канал Bluetooth
- Канал Wi-Fi
- Дисплей
- Исполнительная система
- Электрический двигатель постоянного тока
- Сервомотор
- Шаговый двигатель
- Система энергоснабжения
- Механика робота
- Вспомогательные элементы
- Резистор
- Светодиод
- Выключатель
- Сервисные платы
- Выводы
Глава 2. Провода и их соединения
- Виды проводов
- Одножильные
- Многожильные
- Способы соединений проводов
- Скрутка
- Разъёмные соединения
- Пайка и её основы
- Оборудование и материалы
- Этапы пайки
- Выбор паяльника
- Уход за паяльником
- Припои
- Флюсы
- Выводы
Глава 3. Электропитание
- Закон Ома
- Электрическая мощность
- Характеристики элементов питания
- Номинальное напряжение
- Номинальный ток
- Ёмкость
- Форм-фактор
- Типы элементов электрического питания
- Солевые батареи
- Алкалиновые батареи
- Никель-металлогидридные аккумуляторы
- Литий-ионные аккумуляторы
- Стабилизация электропитания
- Стабилизация напряжения
- Стабилизация электрического тока
- Измерение электрического тока, напряжения и сопротивления
- Выводы
Глава 4. Основы программирования Arduino
- Компьютерная программа
- Алгоритм
- Среда разработки Arduino IDE
- Установка Arduino IDE
- Начало работы с Arduino IDE
- Подключение контроллера Arduino к ПК
- Мигаем светодиодом
- Мониторинг работы программы
- Переменные
- Условные операторы
- Оператор if ... else
- Оператор switch ... case
- Операторы циклов while и for
- Функции
- Элементы объектно-ориентированного программирования
- Разделение программы (внутренние библиотеки)
- Выводы
Глава 5. Ходовая часть
- Типы ходовых частей
- Ноги
- Гусеницы
- Колёса с дифференциалом
- Колёса на моторах
- Летающие роботы
- Выбор двигателей
- Драйверы двигателей
- Широтно-импульсная модуляция
- Вращение в обе стороны
- Сборка макета
- Управляем двигателем без Arduino
- Подключаем контроллер Arduino
- Тестовая программа управления двигателями
- Добавляем регулирование на основе ШИМ
- Тестовая программа управления двигателями с регуляцией на основе ШИМ
- Регулирование скорости вращения без использования аппаратного ШИМ
- Выводы
Глава 6. Сборка базовой модели
- Минимальный комплект
- Элементы питания
- Двигатели
- Драйвер двигателей
- Соединение платы драйвера и двигателей
- Проверка правильности подключения платы драйвера и двигателей
- Верх корпуса
- Установка устройств обратной связи
- Светодиод
- Зуммер
- Укладка проводов
- Выводы
Глава 7. Схема управления движением
- Переменные и функции управления моторами
- Функции движений
- Первая поездка
- Алгоритм
- Программа
- Разделяем программу на два файла
- Сигнал светодиодом
- Выводы
Глава 8. Дистанционное управление роботом
- Способы дистанционного управления
- Управление роботом по каналу инфракрасной связи
- Схема подключения
- Рекомендации по установке
- Установка расширенной библиотеки
- Получение кодов кнопок для используемого пульта
- Программа
- Управление роботом по каналу Bluetooth
- Подбор элементной базы
- Подключение к Arduino
- Смена имени робота
- Настройка смартфона
- Устранение радиопомех
- Программа Выводы
Глава 9. Движение по чёрной линии
- Обнаружение чёрной линии
- Фотодиод
- Фоторезистор
- Фототранзистор
- Инфракрасный датчик отражения TCRT 5000
- Подготовка робота: установка датчиков
- Выводы
Глава 10. Поворотная голова
- Ультразвуковой дальномер HC-SR04
- Схема подключения
- Измерение расстояния
- Управление сервомотором
- Монтаж головы
- Если что-то пошло не так…
- Выводы
Глава 11. Ходовые испытания: обход препятствий
- Программа проверки и настройки основных функций робота
- Константы и постоянные времени
- Отладка программы
- Выводы
Глава 12. Робот, находящий выход из лабиринта
- Способ обхода лабиринта
- Обход лабиринта без модернизации робота
- Программа
- Сравнение и выбор датчиков
- Ультразвуковой датчик HC-SR04
- Инфракрасный детектор препятствия
- Инфракрасный датчик Sharp GP2Y0A21YK
- Обоснование выбора датчиков препятствия
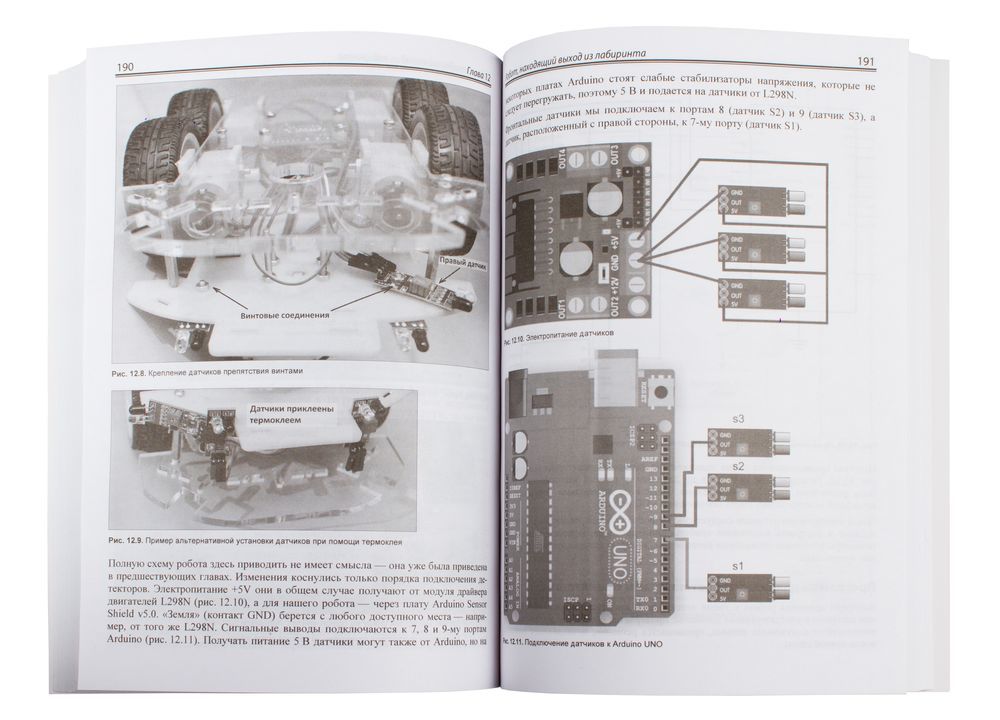
- Модернизация робота
- Монтаж детекторов препятствия
- Программа для робота с детекторами препятствия
- Модернизируем программу
- Выводы
Глава 13. Робот, держащий направление по электронному компасу
- О компасе подробнее
- Электронный компас
- Подключение
- Организация обмена данными
- Модернизация робота
- Получение данных от HMC5883L
- Правильная установка магнитометра
- Программа
- Дополнительные материалы по калибровке
- Выводы
Глава 14. Робот, держащий направление по электронному гироскопу-акселерометру
- Гироскоп
- Акселерометр
- Электронный гироскоп
- Подключение гироскопа-акселерометра MPU-6050
- Получение данных с MPU-6050
- Шкала значений MPU-6050
- Модернизация робота
- Схема подключения
- Программирование
- Основные функции
- Программа
- Выводы
Глава 15. Робот, играющий в кегельринг
- Простой кегельринг
- Двухцветный кегельринг
- Порядок обхода
- Обнаружение чёрной линии
- Обнаружение кегли
- Определение цвета кегли
- Коррекция направления движения
- Модернизация робота с использованием гироскопа
- Установка датчиков
- Программа
- Выводы
Глава 16. Говорящий робот
- Создание и монтаж аудиосистемы робота
- Подготовка аудиосообщений
- Модернизация программы
- Выводы
Глава 17. Балансирующий робот
- Сборка балансирующего робота
- Схема подключения
- Конструкция
- Программирование
- Программа на показаниях гироскопа
- Программа с фильтром Калмана
- Программа с комплементарным фильтром
- Комплементарный фильтр
- Точная настройка
- Выводы
Глава 18. Некоторые улучшения и прочая полезная информация
- Если не хватает портов ввода/вывода
- Сдвиговые регистры: подключаем 8 светодиодов, электронное табло и управляем 18-ю выходами
- Аналоговый мультиплексор: подключаем 16 и более аналоговых датчиков
- Многоканальный PWM-драйвер: робот-андроид на 16 сервомоторах
- Универсальное решение: два контроллера Arduino в связке
- Подключаем шаговые двигатели
- Робот, выполняющий голосовые команды
- Рука для робота
- Ещё раз об электронном архиве
- Как связаться с автором?
Приложение 1. Описание платы Arduino Sensor Shield v5.0
Приложение 2. Содержание электронного архива
Предметный указатель
Наверняка понадобятся


Возможные альтернативы
-
Руководство Джереми Блума по освоению Arduino от А до Я с дополненным содержанием и сетевыми проектами (2-е издание)
1 140 ₽ -
Руководство, которое научит вас работать с Arduino и пользоваться платами расширения для сборки разнообразных проектов
1 140 ₽ -
Книга серии «РОБОФИШКИ» о сборке дальномера и люксметра
370 ₽ -
Книга серии «РОБОФИШКИ» о создании макета умного дома
370 ₽ -
Книга серии «РОБОФИШКИ» о программировании электронного замка на JavaScript
370 ₽




