Драгстер







Обычно драгстером называют гоночный болид с большими колёсами для заездов на четверть мили. Наш Драгстер — умный. Он умеет не только гонять по прямой, но и находит линию под колёсами, определяет скорость, фиксирует пройденную дистанцию и показывает простую анимацию.
Программируй, гоняй, побеждай
В коробке ждёт полностью собранный Драгстер — с контроллером Iskra Neo, восьмиканальным датчиком линии, двумя моторами, светодиодной матрицей и аккумулятором на борту.
Начать знакомство с миром программирования гоночных роботов поможет красочная книжка с инструкциями. Яркие иллюстрации, лаконичные комментарии и подробно разобранный код. Минимум теории — максимум практики.
Мы рекомендуем набор для будущих инженеров с 12 лет, но в сплочённую команду можно пригласить и более юных участников. Не стоит бояться электрического тока — робот работает с постоянным током напряжением менее 12 вольт. Это безопасно для человека и домашних животных.
После успешного прохождения всех экспериментов у вас получится робот для гонок по линии.
Как завести Драгстер
Двадцать один эксперимент разбит на две части.
Сначала мы научим работать с основными модулями робота. Заведём моторы, помигаем светодиодами, выведем индикатор питания и просканируем дорогу перед болидом. Разберёмся с тонкой настройкой датчиков линии и поэкспериментируем с напряжением питания.
В гаражные эксперименты входят:
- Запуск
- Индикация
- Ключ на старт
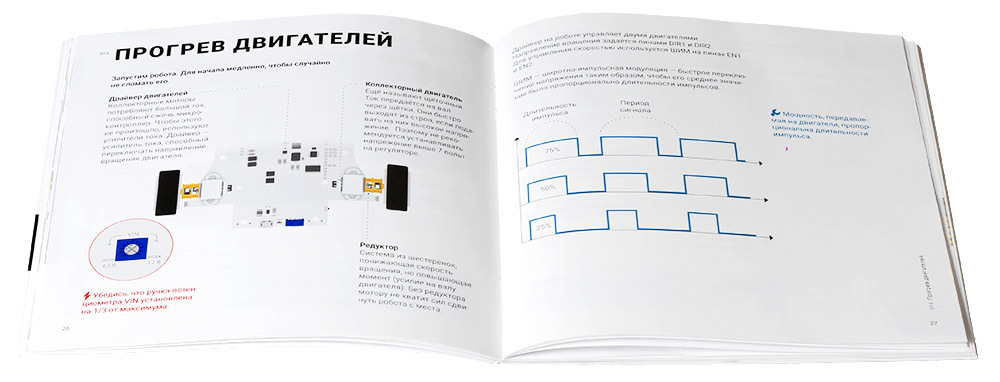
- Прогрев двигателей
- Змейка
- Библиотеки
- Стоп-сигнал
- Поворотники
- Реклама спонсоров
- Уровень заряда
- Энкодер
- Умные энкодеры
- Одометр
- Спидометр
- Домашняя трасса
- Сканер дорожного полотна
Дальше нас ждёт гоночный трек. Начнём с драг-рейсинга — заездов по прямой. Затем научимся гонять по сложным трассам и отладим работу ПИД-регулятора: ускорим реакцию Драгстера на крутые повороты и скорректируем накопленные ошибки.
Эксперименты на треке:
- Следование по линии
- ПИД-регулятор
- Предсказания
- Накопление
Управляющая плата
Iskra Neo — мозг Драгстера. Эта плата эквивалентна итальянской Arduino Leonardo, но производится нами в России и по качеству ничуть не хуже.
Для программирования используется упрощённая версия C++, также известная как Wiring. Разработку можно вести как с использованием привычной среды Arduino IDE, так и с помощью графического языка программирования XOD IDE или произвольного инструментария C/C++ под Windows, MacOS X и Linux.
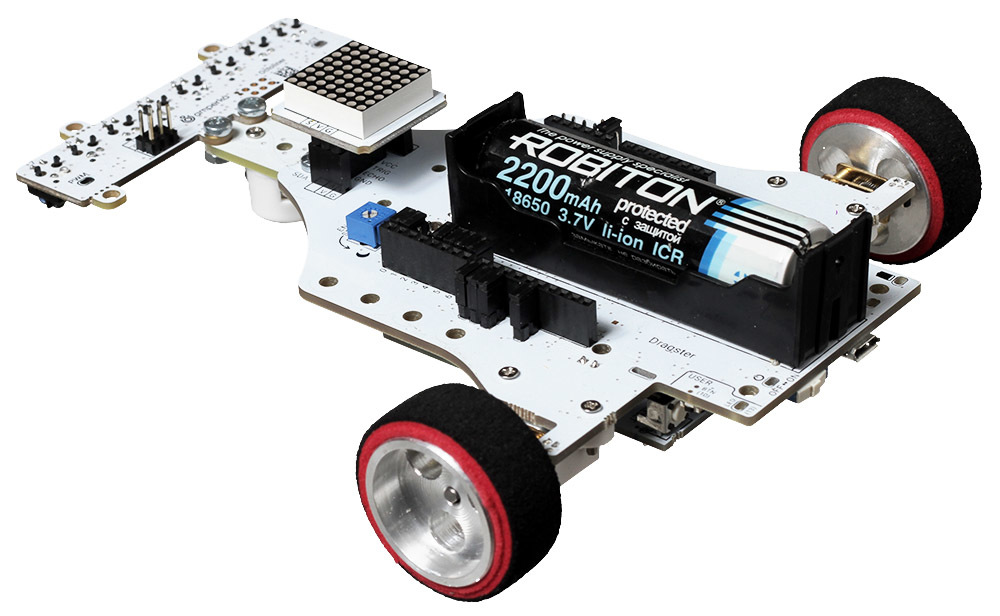
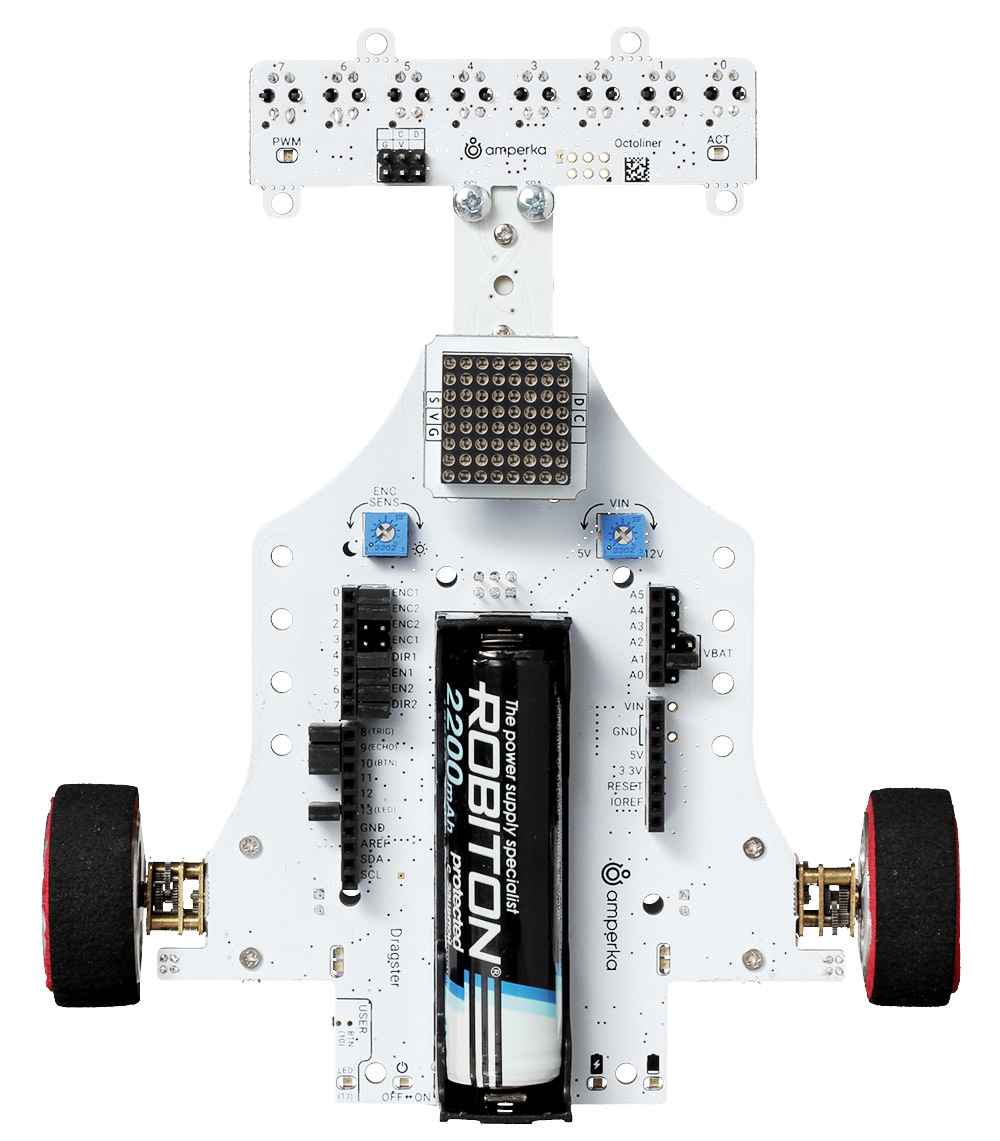
Платформа Драгстер
Основная плата робота сделана в форме гоночного болида. На ней распаяны регуляторы напряжения, драйверы моторов, восемь светодиодов, пара подстроечных потенциометров, программируемая кнопка и ползунок включения питания.
За движение отвечает пара микромоторов с металлическими редукторами 1:100. Рядом с моторами распаяны инфракрасные энкодеры для контроля скорости вращения колёс.
К передней части платы прикреплены шаровая опора и восьмиканальный датчик линии.
Iskra Neo крепится под платой. Если захотите добавить к платформе дополнительные шилды, например, для беспроводной связи или подключения Troyka-модулей, установите их поверх платы через стандартные контактные колодки.
Спереди установлена светодиодная матрица 8×8. На неё можно вывести показания датчика линии, уровень зарядки аккумулятора или текстовую анимацию.
Восьмиканальный датчик линии
Каждый канал датчика состоит из двух элементов — светодиода и фототранзистора. Когда светодиод излучает инфракрасный свет, световой поток отражается от поверхности и попадает на фототранзистор, где преобразуется в электрический сигнал.
Контроллер датчика линии собирает данные с восьми каналов и передаёт управляющей платформе по интерфейсу I²C.
Питание и зарядка
Платформа и контроллер питаются от общего аккумулятора форм-фактора 18650 — вам не придётся постоянно искать новые батарейки, ёмкости аккумулятора хватит на весь гоночный день.
Заряжается аккумулятор прямо на плате: подключите платформу к блоку питания кабелем micro-USB, как обычный смартфон или планшет.
Робот безопасен — напряжение питания в модулях не превышает 12 вольт постоянного тока.
Что в коробке
- Собранный робот
- Книга-инструкция
- Комплект наклеек
- Аккумулятор 18650
- Кабель питания USB (A — Micro USB)
- Ключ-шестигранник для замены двигателей и колёс

Наверняка понадобятся
-
Литий-ионная заряжаемая батарея типа 18650 (168A) на 2500 мА·ч без защиты
990 ₽ -

Cенсор для определения расстояния по отражённому звуковому сигналу
900 ₽ -

Расширение для приёма и отправки SMS, GPRS-данных и голосовой связи c поддержкой Bluetooth
3 090 ₽ -
Плата для удобного и компактного подключения Troyka-модулей без проводов
820 ₽ -

Набор из 4 сквозных контактных колодок для надстройки контактов Arduino R3 с проставкой ICSP
210 ₽






Возможные альтернативы
-

Продвинутый робот для гонок по линии с расширенным комплектом датчиков, светофором, шлагбаумом, таймером круга и углублённым курсом из 45 экспериментов
73 400 ₽ -

Изучите основы робототехники и программирования на JavaScript в 12 экспериментах, собрав няшного мобильного робота
19 790 ₽ -
Стартовый набор Arduino Uno: оригинальная итальянская плата и полный комплект модулей для 20 обучающих проектов на C++
9 990 ₽


