Сервопривод Feetech FB5118M с обратной связью / 300°


Цифровой сервопривод FB5118M с обратной связью — мощный сервомотор, у которого сигнал внутреннего потенциометра выведен отдельным проводом для точного измерения угла поворота. Это пригодится вам, чтобы строить хитрые петли обратной связи, где фигурирует текущее положение вала. Например, чтобы узнать, достиг ли сервопривод целевого положения или ему что-то помешало.
Сервопривод развивает крутящий момент 15 кг·см и обладает углом поворота 300°, то есть может быть установлен в любое положение в пределах 5/6 от полной окружности.
Особенности
- Цифровая схема обеспечивает быстрые и точные реакции сервопривода на управляющие импульсы.
- Возможность поворота на 0–300° с удержанием заданного угла.
- Сигнал обратной связи позволяет более тонко управлять сервоприводом и всегда знать, в каком положении он находится.
- Крутящий момент в пике достигает 15 кг·см, поэтому сервопривод FB5118M подходит для создания манипуляторов, механических рук и захватов.
- Вместе с сервоприводом идёт комплект крепежа и пластиковых качелек. Используйте их, чтобы приводить в действие различные механизмы без необходимости искать насадки.
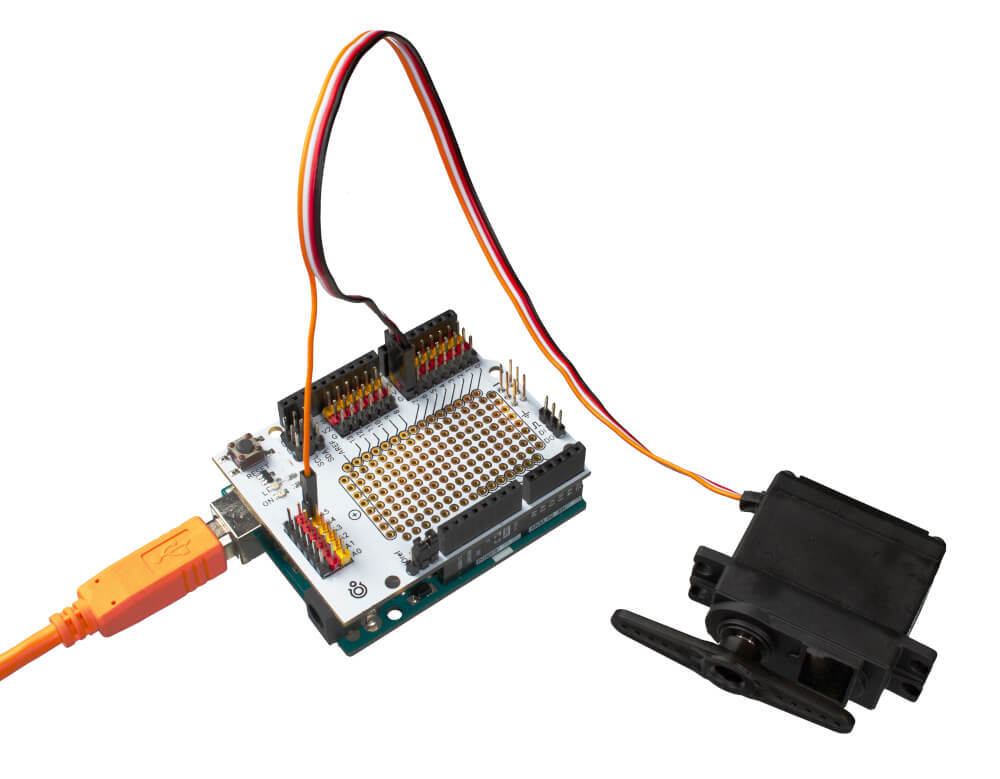
Подключение
Для работы сервопривода необходимы контроллер и внешний источник питания c напряжением 4-8,4 вольта и током не менее 2,5 А.
Привод подключается шлейфом из четырёх проводов:
- Красный — питание привода.
- Чёрный — земля.
- Белый — управляющий сигнал от микроконтроллера.
- Оранжевый — сигнал обратной связи (выход потенциометра).
При подключении к Arduino, Iskra JS, STM32 Nucleo и другим платформам, которые совместимы с шилдами форм-фактора Arduino R3, рекомендуем использовать плату расширения Troyka Shield.
Чтобы одновременно и точно управлять множеством приводов, не занимая ценные пины контроллера, вам пригодится специальный Multiservo Shield. А для одноплатных компьютеров Raspberry Pi советуем взять Troyka HAT.
Работа с сервоприводом
Для управления сервоприводом необходимо подавать импульсы в строгие интервалы. Но не переживайте о битах и байтах — воспользуйтесь готовыми библиотеками для работы с сервомоторами:
Читайте подробную инструкцию по использованию сервопривода с примерами в статье на Wiki.
Возможные альтернативы
Если нужен цифровой сервопривод с обратной связью и свободным вращением на 360°, обратите внимание на FB5317M-360.
Если требуется сервопривод с более высоким крутящим моментом, воспользуйтесь моделью FT5519M.
Комплектация
- 1× Сервопривод FB5118M
- 1× Комплект пластиковых насадок
- 1× Комплект крепежа
Характеристики
- Модель: Feetech FB5118M
- Сигнал управления: PDM (Pulse-Duration Modulation)
- Угол поворота: до 300°
- Напряжение питания: 4–8,4 В
- Номинальный крутящий момент: 5 кг·см
- Пиковый крутящий момент: 15 кг·см
- Скорость вращения: 60° за 0,2 сек (180° за 0,6 сек)
- Потребляемый ток (без нагрузки): 180 мА
- Номинальный ток: 800 мА
- Ток блокировки: 2,5 А
- Внутренний интерфейс: цифровой с обратной связью
- Материал шестерней: сталь
- Материал корпуса: пластик
- Размеры: 54×20,1×44,3 мм
- Вес: 65 г
Наверняка понадобятся
-

Универсальная монтажная алюминиевая втулка-переходник для крепления на вал сервопривода
590 ₽ -

Пара универсальных соединительных скоб для крепления сервоприводов и датчиков
2 390 ₽ -

Универсальный хаб для удобного подключения Troyka-модулей к платам форм-фактора Arduino Uno
830 ₽





Возможные альтернативы
-

Цифровой сервопривод с диапазоном вращения 360°, крутящим моментом 15 кг·см и скоростью до 50 об/мин
2 690 ₽
