H-мост (Troyka-модуль)
Коллекторные моторы — самые доступные и простые электродвигатели. Всего два провода: подключаешь один к плюсу, второй к минусу — и двигатель крутится. Поменял провода местами, направление вращения изменится. Беда в том, что напрямую к Arduino такой мотор не подключишь.
Микроконтроллеры не предназначены для работы с мощной нагрузкой, сила тока на GPIO измеряется всего десятками миллиампер. Даже слабым моторам нужно в разы больше.
Если в проекте мотор всегда должен вращаться в одном направлении, можно использовать силовой ключ. Но если понадобится реверсировать двигатель, придётся менять местами провода. Или подключить мотор через Н-мост.
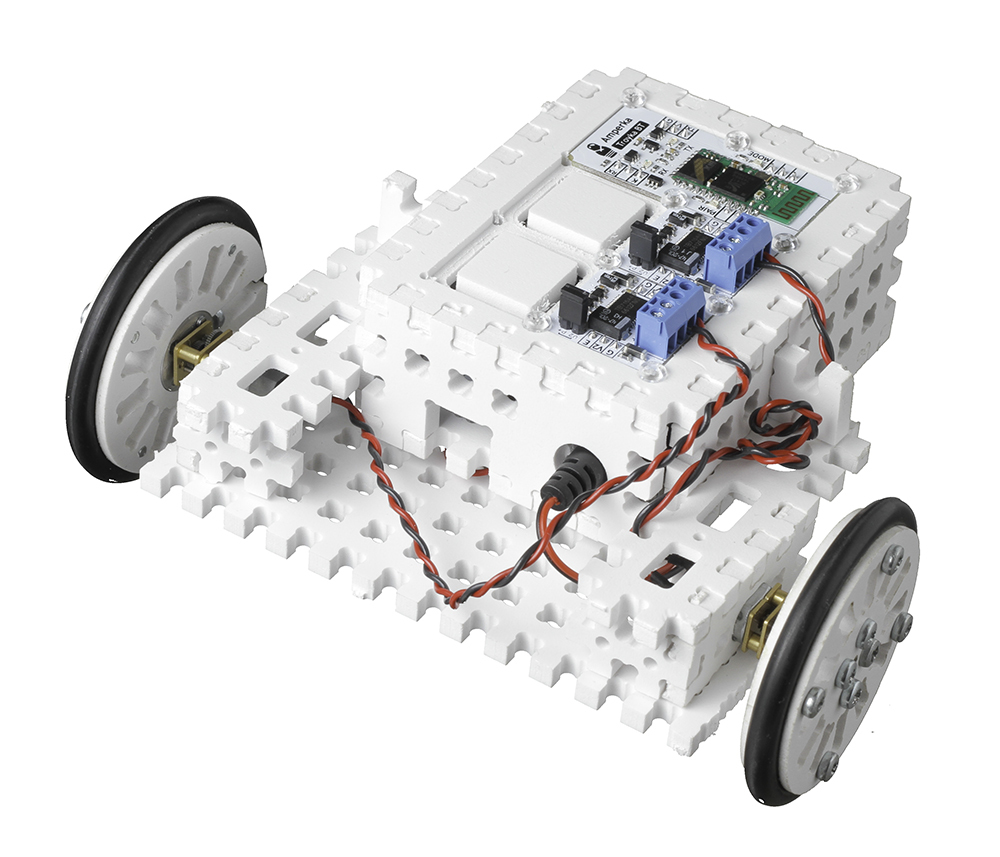
Если вам необходимо рулить сразу двумя двигателями — воспользуйтесь двухканальным H-мостом или Motor Shield.
Начинка
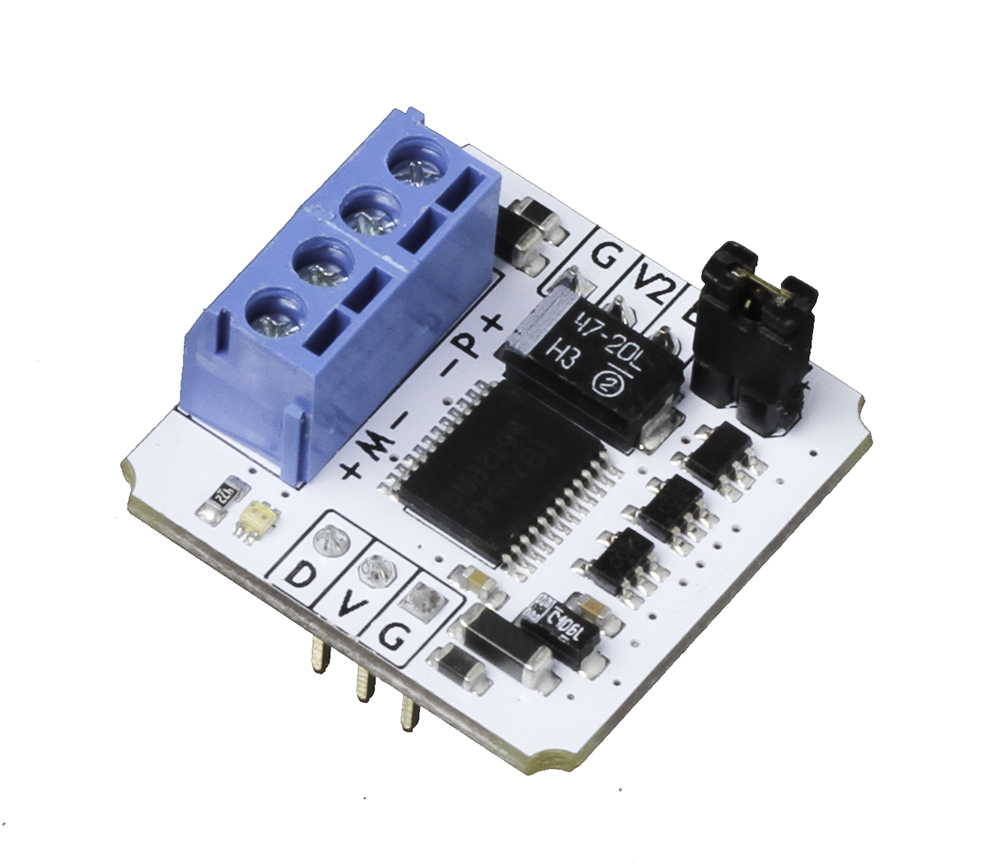
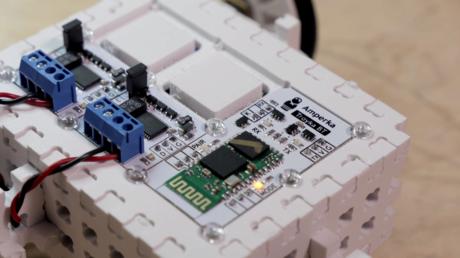
Модуль построен на основе полупроводникового чипа TB6612FNG от компании Toshiba. Он рассчитан на управление моторами постоянного тока и выдерживает пики до 3 Ампер. Для продолжительной работы используйте моторы, рассчитанные на 1,2 Ампера.
При разгоне и торможении коллекторные моторы индуцируют кратковременный обратный ток большой величины, который может выжечь контакты микроконтроллера. На модуле предусмотрена обвязка, которая это предотвращает.
Два светодиода предназначены для индикации режима работы. Цвет информирует о направлении, яркость — о скорости вращения мотора.
Подключение
Модуль подключается к управляющей электронике двумя трёхпроводными шлейфами.
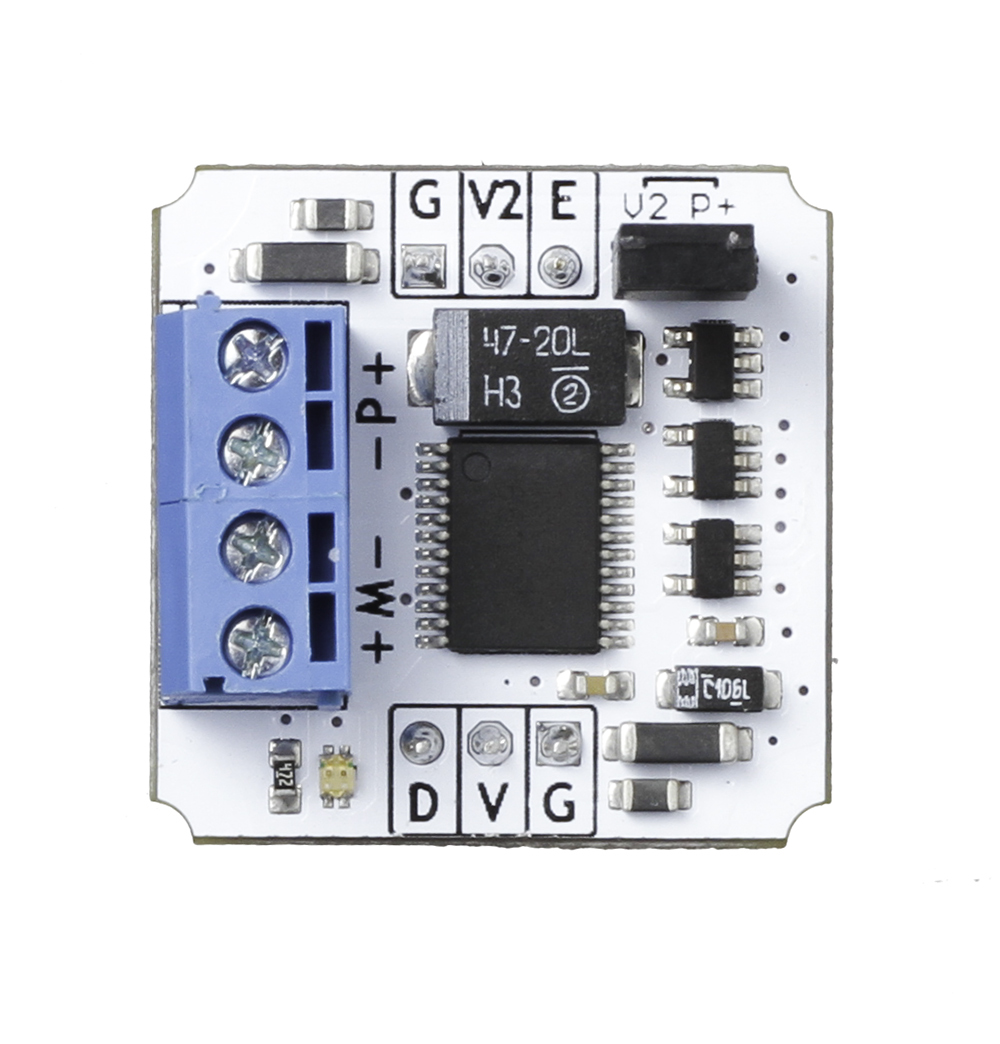
- Контакт D модуля подключите к любому выходу контроллера. Сигнал на пине определяет направление вращения мотора.
- Контакт V подключите к контакту питания 3,3–5 В.
- Контакт G подключите к земле.
- Контакт E используется для управления скоростью вращения. Высокий сигнал запускает мотор. Для изменения скорости используйте ШИМ.
Клеммы M+/М- предназначены для подключения электромотора постоянного тока.
Питание
Модуль H-моста питается от внешнего источника, подключаемого к клеммам P+/P−.
Следите, чтобы характеристики блока питания соответствовали номиналам мотора. Поддерживаются двигатели с рабочим напряжением 3,3–12 В и током до 1,2 А.
Комплектация
- 1× Плата-модуль H-моста
- 2× Трёхпроводной шлейф
Характеристики
- Драйвер моторов: Toshiba TB6612FNG
- Количество подключаемых моторов: 1
- Напряжение логической части: 3,3–5 В
- Напряжение силовой части: 3,3–12 В
- Рабочая сила тока: до 1,2 A
- Допустимая пиковая нагрузка: до 3,2 A
- Максимальная частота переключения (ШИМ): 100 кГц
- Габариты: 25,4×25,4 мм
Ресурсы
Как устроен Н-мост:
Наверняка понадобятся
-
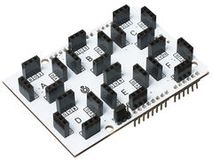
Плата для удобного и компактного подключения Troyka-модулей без проводов
820 ₽ -

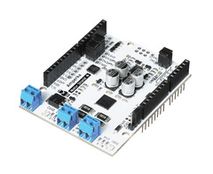
Универсальный хаб для удобного подключения Troyka-модулей к платам форм-фактора Arduino Uno
830 ₽



Возможные альтернативы
-

Модуль для управления двумя коллекторными моторами или шаговым двигателем
1 280 ₽ -
Плата расширения для управления двумя коллекторными моторами или одним шаговым двигателем
2 240 ₽


